
Name of the prototype: Compliant 3PRS
Belonging to the project: Zabalduz 2012 (University of the Basque Country) & MEDUSA (Spanish Government)
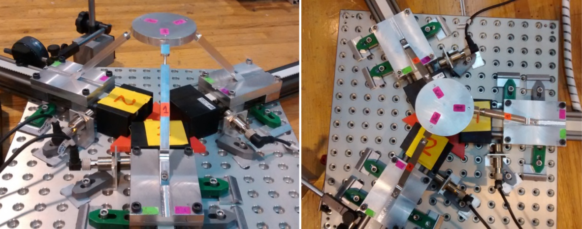 This compliant parallel mechanism with 3 identical limbs (prismatic joint – revolute joint – spherical joint) has 3 degrees of freedom (DOF) — two rotations about X- and Y-axes and a translation about Z-axis. The use of revolute and spherical hinges allows a precise motion without backflash or friction. The movements archived are a vertical motion of +/- 2 mm and a tilt of 1º.
This compliant parallel mechanism with 3 identical limbs (prismatic joint – revolute joint – spherical joint) has 3 degrees of freedom (DOF) — two rotations about X- and Y-axes and a translation about Z-axis. The use of revolute and spherical hinges allows a precise motion without backflash or friction. The movements archived are a vertical motion of +/- 2 mm and a tilt of 1º.
Publications:
Authors: Antonio Ruiz Martín, Francisco Javier Campa Gómez, Constantino Roldán-Paraponiaris, Oscar Altuzarra, Charles Pinto
Title: Experimental validation of the kinematic design of 3-PRS compliant parallel mechanisms
Journal: Mechatronics, 39, pp. 77-88, Elsevier, 2016
ISSN: 0957-4158
