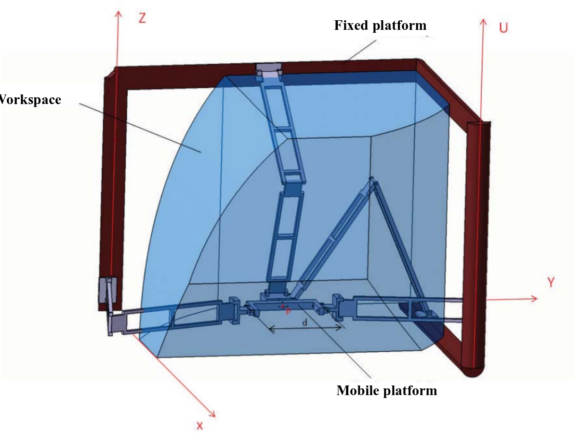
Daedalus I is a lower mobility parallel manipulator with 4 degrees of freedom: 3 translations and 1 rotation. The rotation takes place in a horizontal plane. It has been designed for pick & place operations, for which high velocity and acceleration are required. Besides, high stiffness is essential to get and place the objects with precision and repeatability.
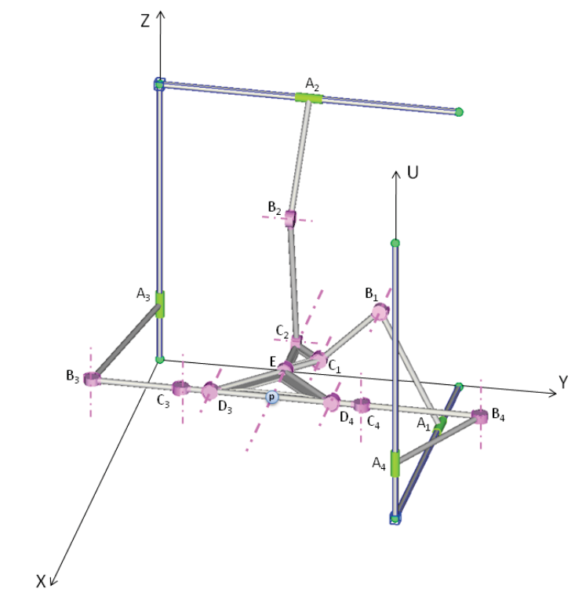
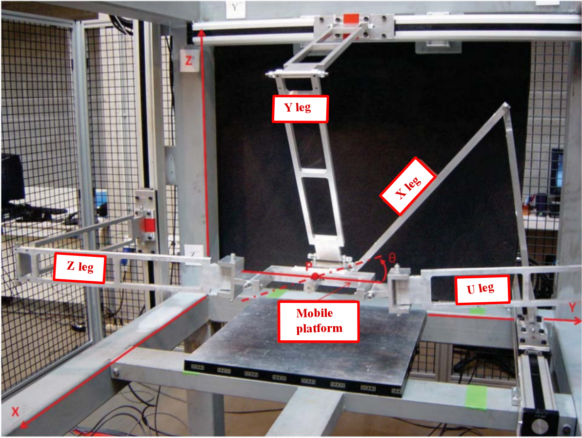
The manipulator consists of a fixed and a mobile platform connected by four legs. Two legs are identical and have, starting from the fixed platform, an actuated cylindrical joint and two rotational joints (CRR). The other two legs are also identical and have an extra rotational joint (CRRR).