|
ARABA Parallel
Robot |
Introduction Kinematics CAD Prototype Videos
Title: "Diseño, síntesis y verificación de manipuladores paralelos para producción industrial. Aplicación a manipuladores de baja movilidad"
Inventors: O. Salgado, O. Altuzarra, A. Hernández, Ch. Pinto and V. Petuya
Entity: Universidad del País Vasco UPV/EHU
Patent Reference: P200702793
Country: Spain
Date: 10-24-2007
Go top Î
|
see reference: Title: “Synthesis and Design of a Novel 3T1R fully-Parallel Manipulator” Authors: Salgado, O.; Altuzarra, O.; Petuya, V.; Hernández, A. Journal: Journal of Mechanical Design. 2008, vol. 130, no4. ISSN: 1050-0472 Publisher: ASME – American Society of Mechanical Engineers.
|
Go top Î
|
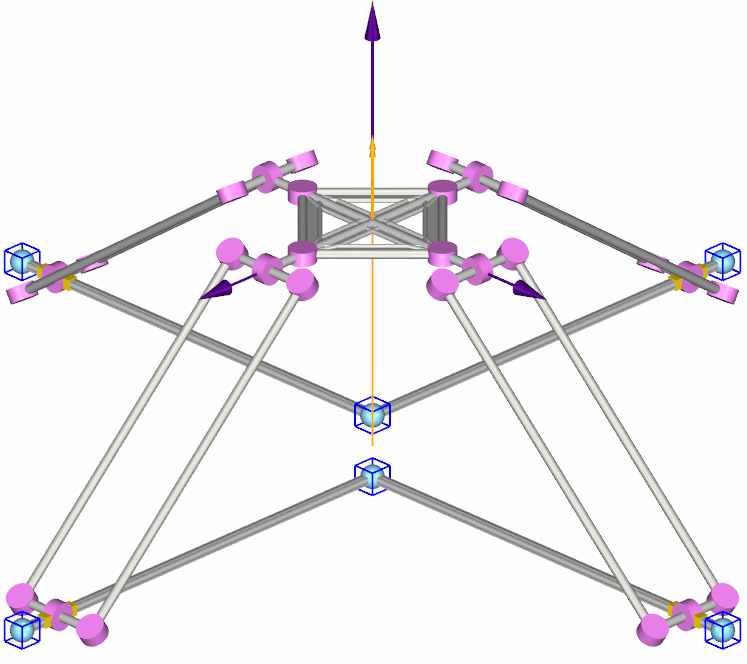
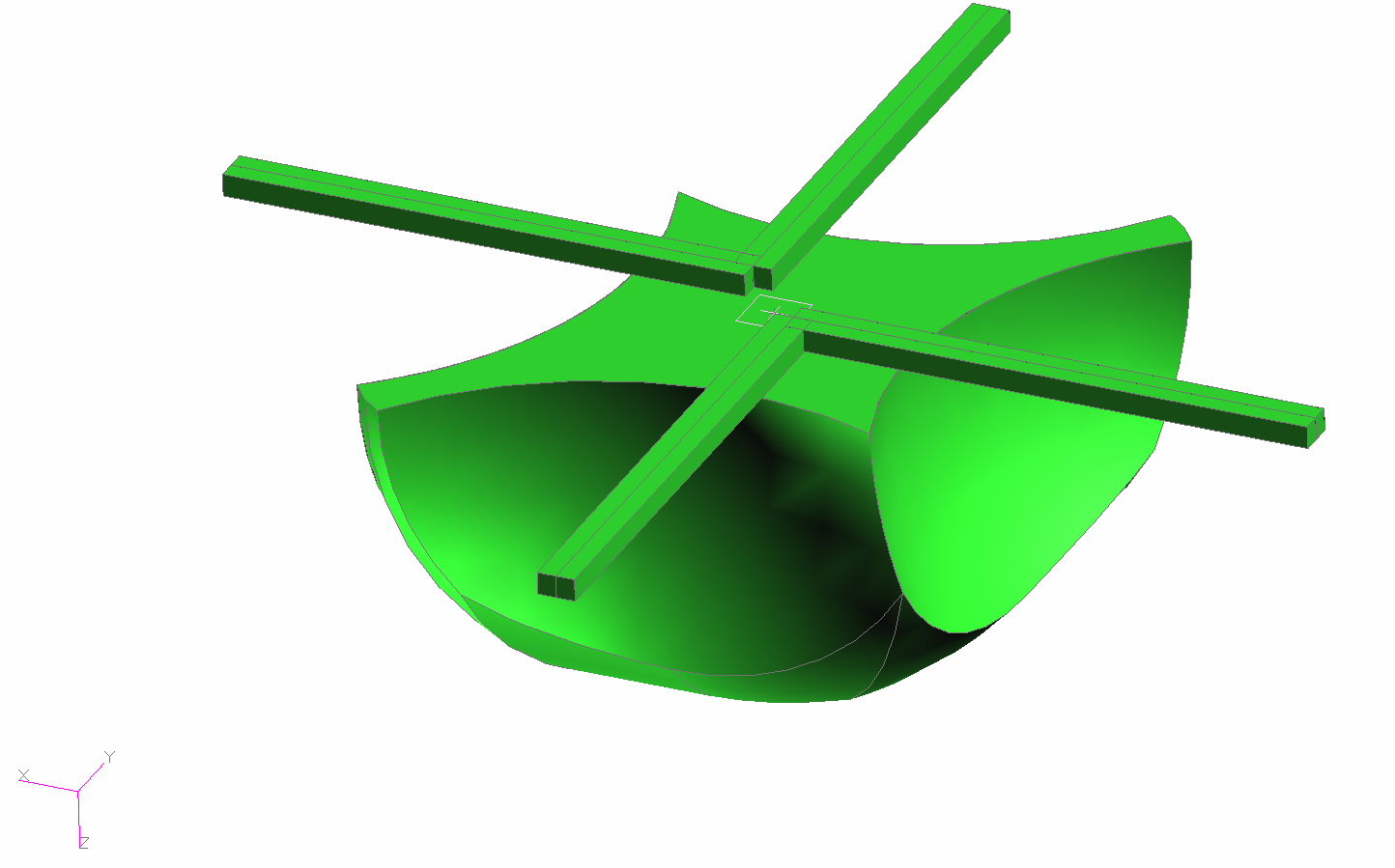
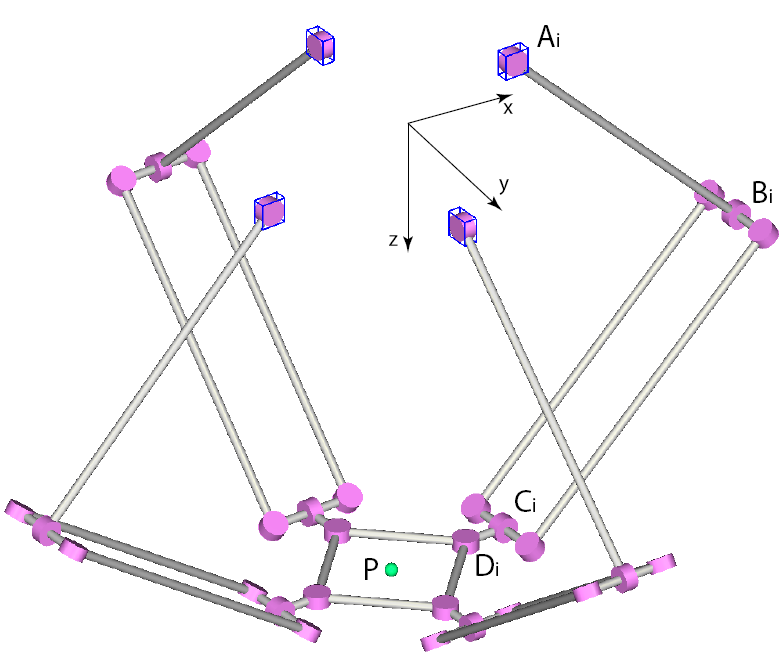
Motion Pattern - 3T1R Workspace
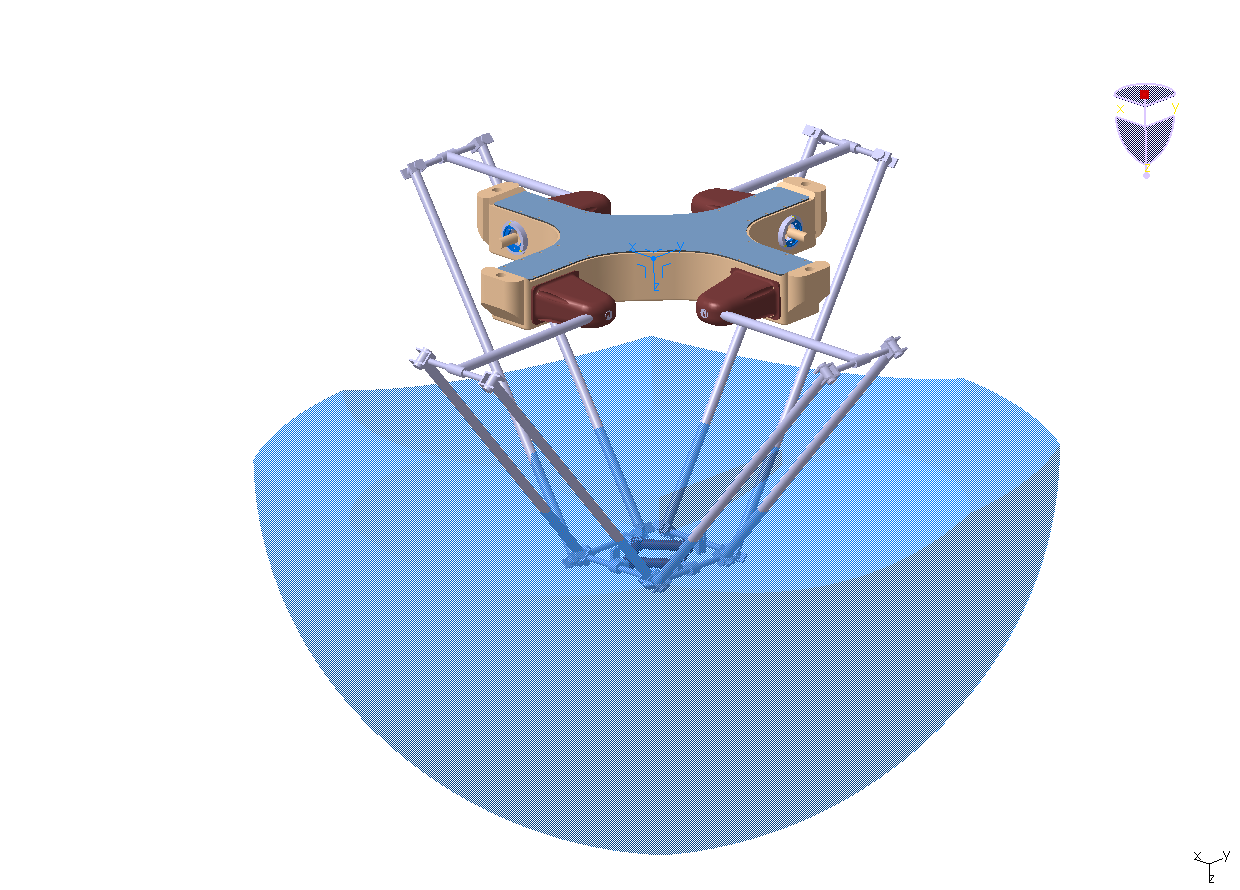
CAD model (linear input)
Symmetric Schonflies motion generator with rotational inputs Workspace for the Symmetric Schonflies motion generator
|
Go top Î
|
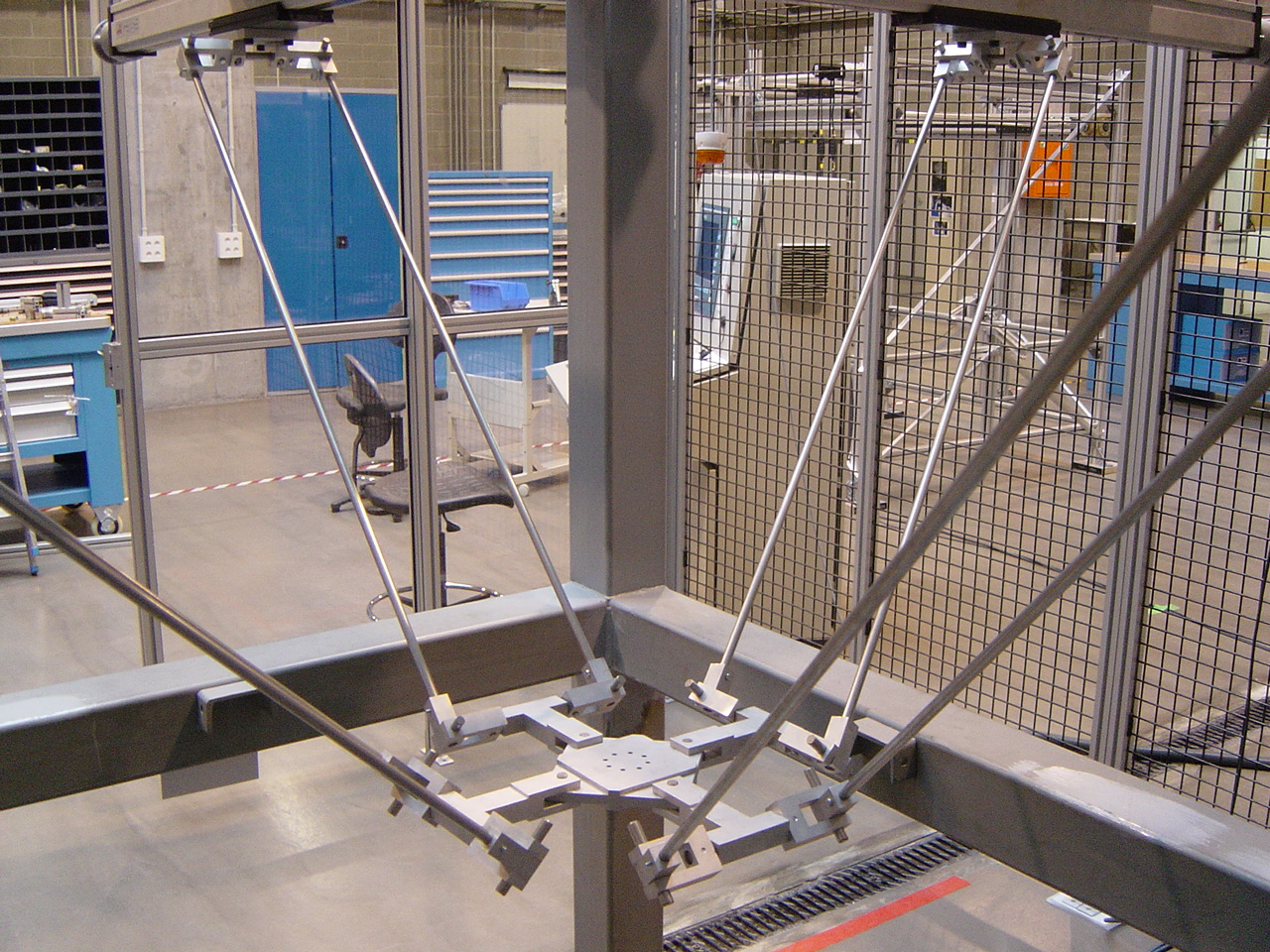
Prototype pictures
|
Go top Î
| Download video #1 (88Mb) - click here |
| Download video #2 (71Mb) - click here |
| Download video #3 (114Mb) - click here |
Go top Î
| Introduction Kinematics CAD Prototype Videos |
Back to main page O
Last Update: 09/2008