
Title: Parallel robot with four degrees of free movement
Inventors: O. Salgado, O. Altuzarra, A. Hernández, Ch. Pinto, V. Petuya
International application number: PCT/ES2008/000647
International publication number: WO 2009/053506 A1
International filling date: 16.10.2008
Publication data: 30.04.2009
Belonging to: University of the Basque Countr (UPV/EHU)
Description of the invention
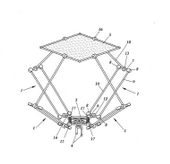 Parallel robot with four degrees of free movement which comprises four articulated kinematic chains, each of said articulated kinematic chains being linked by a first end to a moving platform configured to hold a tool and a second end to a fixed element. Said moving platform comprises a rigid (non-flexible) element, or an element formed by the connection of a series of members in such a way that said connection is rigid and does not allow for relative movement between the different members, therefore forming a single element from a mechanical viewpoint.
Parallel robot with four degrees of free movement which comprises four articulated kinematic chains, each of said articulated kinematic chains being linked by a first end to a moving platform configured to hold a tool and a second end to a fixed element. Said moving platform comprises a rigid (non-flexible) element, or an element formed by the connection of a series of members in such a way that said connection is rigid and does not allow for relative movement between the different members, therefore forming a single element from a mechanical viewpoint.
According to the present invention, when a user wants to get out of a vehicle, the cushion rises up to a determined position and it simultaneously moves laterally towards the access door of the vehicle and longitudinally towards the front of the seat. Once the user has gotten out of the vehicle the cushion performs the opposite movements, so that it goes back to a resting position in the seat of the vehicle.