
Current projects
STABLE – Characterization of balance stability in standing and walking through the use of parallel kinematics machines
The objective of this project is to develop a methodology to evaluate balance stability by measuring the Center of Mass (COM) and the Center of Pressure (COP) during the execution of exercises on two parallel kinematics machines, designed for this purpose by the research group and called OREKA and BALANCE. The purpose of the machines is to reduce uncertainty when evaluating the patient’s response, using the measurement of COP through a dynamometric table and also introducing a quantifiable and repeatable disturbance to stimulate the patient’s response. […] Read more>>
Funding: Science and Innovation Ministry, Spanish Government
Reference: PID2023-150982OB-I00
Period: 2024-2027
INBALANCE – Clinical trial of a machine based on parallel kinematics for the diagnostic and rehabilitation of the human balance
personalized and it is more effective and faster with the consequent economic savings due to the reduction in the number of therapeutic sessions. […] Read more>>
Reference: PDC2022-133787-I00
Period: 2022-2024
FLEXKIN – Ultraflexible parallel mechanisms kinematic characterization
The goal of this project is to develop a methodology for the design of flexible mechanisms, including those with closed kinematic chains, in 2D and 3D configurations. In the last decades, compliant mechanisms have become widespread and the first applications of continuum mechanisms in microsurgery soon appeared. This field also captures attention when robotic research turns to human-robot collaboration. […] Read more>>
Funding: Science and Innovation Ministry, Spanish Government
Reference: PID2020-116176GB-I00
Period: 2021-2024
The motivation of this project is to provide the health system with a usefuland efficient tool that measures objectively the deficit level of the balance function and helps during the rehabilitation process to recoverthat function as much as possible. […] Read more>>
Funding: Science and Innovation Ministry, Spanish Government
Reference: PID2019-105262RB-I00
Period: 2020-2023[/ezcol_1third_end]
OREKA – Development of a sensors integrated mobile platform for the evaluation and trainning of balance deficits
The main objective of the project is to measure the balance function of patients in an objective way in order to improve the diagnosis and rehabilitation. The device developed consists of a parallel manipulator with three degress of freedom – one vertical translation and two rotations […] Read more>>
Funding: Basque Government
Reference: 2018222013
Period: 2018-2020[/ezcol_1third_end]
[ezcol_2third]
This project provides part of the funding of the Congress OC17/07 CASEIB (Congreso Anual de la Sociedad Española de Ingeniería Biomédica) which will take place in Bilbao between the 29th November 2017 and 1st December 2017. . […] Read more>>
[/ezcol_2third]
[ezcol_1third_end]
Funding: Basque Government
Period: 2017[/ezcol_1third_end]
[ezcol_2third]
The aim of this project is to help in the organization of the Congress OC17/07 CASEIB (Congreso Anual de la Sociedad Española de Ingeniería Biomédica) which will take place in Bilbao between the 29th November 2017 and 1st December 2017. . […] Read more>>
[/ezcol_2third]
[ezcol_1third_end]
Funding: UPV/EHU
Period: 2017[/ezcol_1third_end]
[ezcol_2third]
Currently, this project is one of the main funding source that COMPMECH research group has. Thanks to the project titled Convocatoria competitiva de grupos de investigación consolidados del sistema universitario vasco that the Basque Government awards to consolidated and renowed research groups, COMPMECH research group can continue working in the field of mechanisms and machines with parallel architecture. […] Read more>>
[/ezcol_2third]
[ezcol_1third_end]
Funding: Basque Government
Reference: IT949-16
Period: 2016 – 2021[/ezcol_1third_end]
[ezcol_2third]
Traditionally, the design of robotic systems has focused on achieving robust and efficient models, optimized for a specific task. However, at the end of the last century, a novel idea started to grow up which consisted in designing machines and mechanisms capable of carrying out several tasks, thus offering higher flexibility and versatility. To sum up, the target is to get multioperational systems in such a way that the robots can change their configuration to execute multiple tasks. Nowadays, the technical chance exists to design and install them in several fields such as mounting small series of large components in the aeronautical and eolic field, flexible tasks in packing and folding, deployable antennas and trusses, biomedical and rehabilitation applications […] Read more >>
[/ezcol_2third]
[ezcol_1third_end]
Funding: Ministerio de Economía y
Competitividad
Reference: DPI2015-67626-P
Period: 2016 – 2019[/ezcol_1third_end]
[ezcol_2third]
CompMech has a lengthy trajectory in the design of parallel kinematic machines, has developed tasks on stiffness analysis, vibrations and mechatronics in the scope of the National Research Program. Lately, the group has been researching into the field of large deformations applying to closed loop flexible mechanisms. Parallel kinematic machines, comprising articulated rigid links, have reached maturity and a predominant position in the field of industrial manipulators and high precision micro positioning systems. Small deformations and vibrations in such systems are compensated as in serial machines. On the other hand, in ultra flexible machines, kinematic pairs are removed to generate the motion with the large deformations of their elements. […] Read more >>
[/ezcol_2third]
[ezcol_1third_end]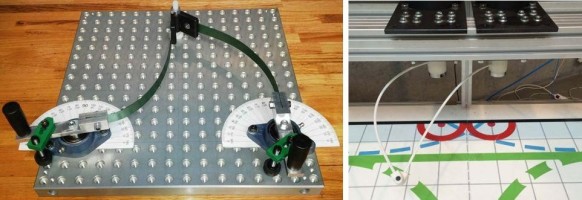
Funding: Ministerio de Economía y
Competitividad
Reference: DPI2015-64450-R
Period: 2016 – 2019[/ezcol_1third_end]
Previous projects
[ezcol_2third]
Design of Multiaxial Parallel Kinematic Machines with High Dynamic Capabilities (DYNAMECH). Multi-axis machines are linkage-based systems able to generate in their end-effector a coupled motion combining translations and rotations. The main applications are the multi-axis testing tables, flight simulators, vehicle simulators, etc. Nowadays, the configuration of the multi-axis testing tables (MAST) is based on a moving platform coupled to at least three actuators. In the case of the simulation systems, the traditional structure used is the hexapod. This limited scope of design alternatives is mainly due to the lack of theoretical bases in this field, which still needs a further scientific development. In this sense, the platform motion is particularly complex […] Read more >>
[/ezcol_2third]
[ezcol_1third_end]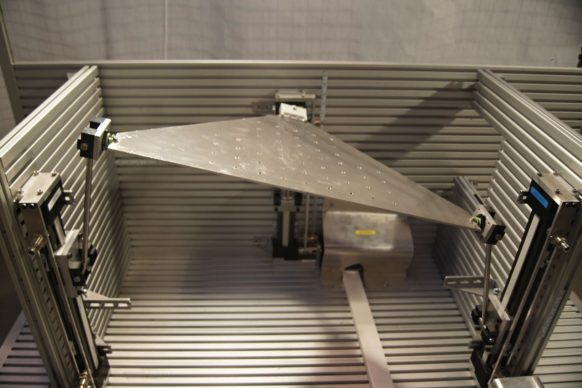
Funding: Ministerio de Ciencia
e Innovación
Reference: DPI2011-22955
Period: 2012 – 2014[/ezcol_1third_end]
[ezcol_2third]
The Research and Training Unit is comprised of five research groups belonging to the Department of Mechanical Engineering at the Faculty of Engineering in Bilbao, University of The Basque Country (UPV/EHU). Its main objectives cover three important fields: sustainability engineering and structural and mechanic design, high performance eco-manufacture and sustainability construction.
The activities of the Compmech Research group are focused on sustainability engineering and structural and mechanical design. Inside this area works enclose basic and applied research regarding eco-design, calculus and mechanical analysis of structural components, mechanisms and machines. […] Read more >>
[/ezcol_2third]
[ezcol_1third_end]
Funding: University of the Basque
Country (UPV/EHU)
Reference: UFI11/29
Period: 2011 – 2015[/ezcol_1third_end]
[ezcol_2third]
The project entitled Mechatronic analysis of multi-axis agile machines and funded by the University of the Basque Country has several objectives. The first one is the development of a procedure for the mechatronic modelling of a parallel kinematic mechanism. This procedure has to include the control algorithm, the location of the sensors, the kinematics and dynamics of the mechanism and the dynamic of the actuators. Apart from that, we should be able to select the best control option for a parallel kinematic machine, taking its dynamic, the position of the sensors and its actuators into account […] Read more >>
[/ezcol_2third]
[ezcol_1third_end]
Funding: University of the Basque Country
Reference: EHUA13/30
Period: 2013 – 2014[/ezcol_1third_end]
[ezcol_2third]
This project deals with the mechatronic design of machines with parallel kinematics. It focuses not only on the methodology, but also on the use of analytical mechanics in order to simplify the study of the dynamics of the manipulator, on the integral modelling of the mechanical-mechatronic system and on the experimental identification of parameters of the actuators – such as friction. The methodology has been applied and satisfactorily validated by the redesign and experimental analysis of the prototype of a parallel manipulator. […] Read more >>
[/ezcol_2third]
[ezcol_1third_end]
Funding: Basque Government
Reference: UPV/EHU: SAI13/245
Period: 2013[/ezcol_1third_end]
[ezcol_2third]
The thinkMOTION project as part of Europeana leads to the world?s largest, free access digital library of content in the field of motion systems, which is essential for all technical domains. The thinkMOTION project helps to make a significant improvement in the quantity and quality of digital content and establishes a new kind of digital library in Europeana with focus on technical knowledge. It covers both the cradle of technical knowledge of mankind and the rapid technical progress. […] Read more >>
[/ezcol_2third]
[ezcol_1third_end]
Funding: Information and Communication
Technologies Policy Support Programme
Reference: FP7-CIP-ICT-PSP-2009-3
Period: 2010 – 2013[/ezcol_1third_end]
[ezcol_2third]
This project is a continuation of our late MEC’s project DPI 2005-02207, titled “Design, synthesis and verification of parallel manipulators for industrial production. The case of lower mobility platforms”. There, lower mobility (less than six degrees of freedom) manipulators with uncoupled freedoms, i.e. simple and invariant motions (translational, spherical, and SCARA), were analysed. Now, in this project, lower mobility manipulators with mixed freedoms have been treated. This latter characteristic means that translation and rotation are coupled so that complex screw motions are generated. The last feature is very relevant and influences the project’s objectives. […] Read more >>
[/ezcol_2third]
[ezcol_1third_end]
Funding: Ministerio de Ciencia
e Innovación
Reference: DPI2008-00159
Period: 2010 – 2013[/ezcol_1third_end]
[ezcol_2third]
Parallel manipulators have a kinematic structure that has some advantages over serial manipulators with an anthropomorphic structure, such as rigidity, precision, velocity and acceleration. Nowadays, these characteristics are highly demanded in the manufacturing of aeronautical components and for the automotive industry. Parallel manipulators have found a place in applications such as flight simulators or pointing devices, but they have not jumped into industrial production yet. This is due to several causes. First, the parallel structure that provides so many advantages has a complex kinematics that generates highly non-linear equations, and as a consequence the technological knowledge in parallel manipulators […] Read more >>
[/ezcol_2third]
[ezcol_1third_end]
Funding: Ministerio de Educación y Ciencia
Reference: DPI2005-02207
Period: 2005 – 2008[/ezcol_1third_end]