
Name of the project: Design of Multiaxial Parallel Kinematic Machines with High Dynamic Capabilities (DYNAMECH)
Reference: DPI2011-22955
Funding: Ministerio de Ciencia e Innovación
Period: 2012 – 2014
 Design of Multiaxial Parallel Kinematic Machines with High Dynamic Capabilities (DYNAMECH). Multi-axis machines are linkage-based systems able to generate in their end-effector a coupled motion combining translations and rotations. The main applications are the multi-axis testing tables, flight simulators, vehicle simulators, etc. Nowadays, the configuration of the multi-axis testing tables (MAST) is based on a moving platform coupled to at least three actuators. In the case of the simulation systems, the traditional structure used is the hexapod. This limited scope of design alternatives is mainly due to the lack of theoretical bases in this field, which still needs a further scientific development. In this sense, the platform motion is particularly complex when the number of rotational degrees of freedom is two. In this case, the rotation axes change along the workspace of the machine. Also the complex resolution of the forward position problem caused by the non-linearity of the system of position equations, which is highly coupled, has influence in several machine capacities. Some of the referred limitations are the control instability and the computation of the rotational workspace. Other difficulties inherent to these configurations are the parasitic motions and the limited angular ranges. Consequently, it is necessary to develop a morphologic synthesis procedure in order to obtain solution designs with a minimum number of joints, taking also into account the effective joint ranges and the link collisions.
Design of Multiaxial Parallel Kinematic Machines with High Dynamic Capabilities (DYNAMECH). Multi-axis machines are linkage-based systems able to generate in their end-effector a coupled motion combining translations and rotations. The main applications are the multi-axis testing tables, flight simulators, vehicle simulators, etc. Nowadays, the configuration of the multi-axis testing tables (MAST) is based on a moving platform coupled to at least three actuators. In the case of the simulation systems, the traditional structure used is the hexapod. This limited scope of design alternatives is mainly due to the lack of theoretical bases in this field, which still needs a further scientific development. In this sense, the platform motion is particularly complex when the number of rotational degrees of freedom is two. In this case, the rotation axes change along the workspace of the machine. Also the complex resolution of the forward position problem caused by the non-linearity of the system of position equations, which is highly coupled, has influence in several machine capacities. Some of the referred limitations are the control instability and the computation of the rotational workspace. Other difficulties inherent to these configurations are the parasitic motions and the limited angular ranges. Consequently, it is necessary to develop a morphologic synthesis procedure in order to obtain solution designs with a minimum number of joints, taking also into account the effective joint ranges and the link collisions.
The fulfilment of a high dynamic capacity specification involves performing several novel inputs in the mechanical design. So, the dimensional synthesis process must imply new criteria related to the kinematic and dynamic dexterities applied to manipulators in which translations and rotations are combined. In parallel, the high variability of the natural frequencies and the normal modes along the workspace have to be taken into account. Additionally, in the dimensioning process of the actuators, integrating the dynamics of the mechanical structure and the actuation system in order to get a real mechatronic integral design of the machine is essential.
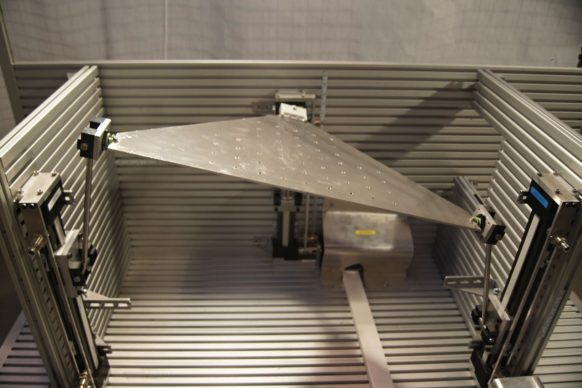
All the theoretical developments of this project have been implemented in an existing software of the research group. These developments are focused on solving the main limitations of the mechanical design of multi-axis parallel machines with high dynamic capabilities which have constrained the evolution of new designs. Moreover, the design and construction of a prototype to validate the theoretical developments was one of the main targets of this project.
Protein motion simulation
 This project includes an innovative research line: the simulation of protein motion. The discovery of the human genome was a milestone in the study of genetics, especially in the area of proteins. The human genome provides unique working tool, providing the opportunity of coming across new proteins and therefore obtaining information about the biological processes that take place within each cell. Proteins are one of the most important chemical compounds of living beings because they participate in most of the functions necessary for life. One of the most important topics within the proteins research is the study and collection of protein structures and the possible movements this structures can carry out.
This project includes an innovative research line: the simulation of protein motion. The discovery of the human genome was a milestone in the study of genetics, especially in the area of proteins. The human genome provides unique working tool, providing the opportunity of coming across new proteins and therefore obtaining information about the biological processes that take place within each cell. Proteins are one of the most important chemical compounds of living beings because they participate in most of the functions necessary for life. One of the most important topics within the proteins research is the study and collection of protein structures and the possible movements this structures can carry out.
Few years ago a new approach has made its way in the proteins field. This new approach, which could be designated as Biokinematics, tries to apply techniques and concepts of robotics and kinematics to the study of proteins. Tecniques like Probabilistic Roadmap mapping, modal analysis or rigidity analysis have been applied in order to obtain protein motion paths.
The aim of this project is to simulate protein function movement using proteins? real degrees of freedom. A procedure is being developed that performs a sequential and incremental rotation of the dihedral angles until they reach their final value. To determine the angular increment for each of the degrees of freedom durign the sumulation process, the algorithm evaluates the potential energy of the protein (potential field of AMBER parameters Cornell) along the simulation, but avoid using minimization procedures. In order to increase the quality of the experimental data positions, an algorithm has been developed for the normalization of the protein structure. Currently, the algorithm is able to correct errors regarding peptide planes and interatomic bond lengths. The results are promising obtaining a more stable protein (the potential energy is about 15% lower in the normalized structure) maintaining the biological sense. Every algorithm is implemented in a software under development called GIMPRO.
This research is supported by the Spanish Government through the Ministerio de Educación y Ciencia (Project DPI2011-22955).
In the following there is a compilation of the papers published with regards to this project:
Journals:
- M. Urízar and Manfred L. Husty. Assembly Mode Change of Spherical 3-RPR Parallel Manipulator. Mechanics Based Design of Structures and Machines, 2012. ISSN: 1539-7734.
- Aginaga, J., Zabalza, I., Altuzarra, O. and Nájera, J. Improving static stiffness of the 6-RUS parallel manipulator using inverse singularities. Robotics and Computer-Integrated Manufacturing, 28 (4), 458–471, 2012. ISSN: 0736-5845.
- Altuzarra, O., Aginaga, J., Pinto, C. and Iriarte, X. Clearance Effects in Parallel Manipulators: Position Error Discontinuities and Inertial Effects Influence. Journal of Mechanics Engineering and Automation 2 (1) 41-51, 2012. ISSN: 2159-5275.
- Aginaga, J., Zabalza, I., Altuzarra, O. and Nájera, J. Improving static stiffness of the 6-RUS parallel manipulator using inverse singularities. Robotics and Computer-Integrated Manufacturing 28 (4), 458–471, 2012.
- Macho, E.; Petuya, V.; Altuzarra, O.; Hernández, A.. Planning non-singular transitions between solutions of the direct kinematic problem from the joint space.. ASME Journal of Mechanisms and Robotics, Vol. 4, No 4, pp. 041005 (9 pages), 2012.
- A. Zubizarreta; E. Portillo; I. Cabanes; D. Orive; M. Marcos; Ch. Pinto.. Real-time environment design for testing advanced control approaches in parallel robots. Application to the 5R parallel robot prototype. The International Journal of Advanced Manufacturing Technology, Vol 63, Numbers 9-12 (2012).
- J. Corral, Ch. Pinto, F. J. Campa and O. Altuzarra . Surface location error of a parallel robot for routing processes. The International Journal of Advanced Manufacturing Technology (2012).
- Altuzarra, O.; Salgado, O.; Pinto, Ch.; Hernández, A.. Analytical determination of the principal screws for general screw systems.. Mechanism and Machine Theory. Vol. 60, pp. 28-46 (2013).
- A. Zubizarreta; I. Cabanes; M. Marcos; Ch. Pinto.. A redundant dynamic model of parallel robots for model-based control . Robotica 31 (2013) 203-216.
- J. Corral, Ch. Pinto, O. Altuzarra, A. Zubizarreta.. Characterisation of parallel kinematic machines based on structural workspaces. Mechanics & Industry (2013). DOI: 10.1051/meca/2013049.
- J. Aginaga, O. Altuzarra, E. Macho, X. Iriarte. Assessing Position Error Due to Clearances and Deformations of Links in Parallel Manipulators. Journal of Mechanical Design, Vo. 135, 041006-1 (8 pages) (2013).
- M. Urízar, V. Petuya, E. Amezua and A. Hernández. Characterizing the Configuration Space of the 3-SPS-S Spatial Orientation Parallel Manipulator. Meccanica, Vol. 49 (5), pp. 1101–1114 (2014).
- O. Altuzarra, E. Macho, J. Aginaga, V. Petuya. Design of a solar tracking parallel mechanism with low energy consumption. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science (2014).
- A. Hernández, M. Urízar, V. Petuya, E. Amezua and M. Diez. Estado de la técnica de los manipuladores paralelos. Aplicaciones prácticas y criterios cinemáticos de diseño. DYNA Ingeniería e Industria, Vol. 90, Nº 2, pp. 145-151, 2015.
- S. Herrero, T. Mannheim, I. Prause, Ch. Pinto, B. Corves, O. Altuzarra. Enhancing the Useful Workspace of a Reconfigurable Parallel Manipulator by Grasp Point Optimization. Robotics and Computer Integrated Manufacturing, pp. 51-60, (2015).
Books:
- Micromechanics and Microactuators. Editors: G.K Ananthasuresh, B. Corves, V. Petuya. 144 pages, ISBN 978-94-007-2720-5. SPRINGER, 2012.
- Latest Advances in Robot Kinematics. Editors: J. Lenarcic and M. Husty. Dynamic Capabilities of a Parallel Robot Based Routing Machine. ISBN: 978-94-007-4619-0. Springer Sciences, 2012.
- New Advances in Mechanisms, Transmissions and Applications. Proceedings of the Second Conference MeTrApp 2013. ISBN: 978-94-007-7484-1. Edited by Springer. Editorss. V. Petuya, Ch. Pinto and E.C. Lovasz
Conferences:
- V. Petuya; M. Diez; E. Amezua; A. Hernandez. Protein motion simulation algorithm for dihedral angle rotation implementing variable speed. 2nd International Conference on Microactuators and Micromechanisms (MAMM 2012). Durgapur, India, 19 al 20 de enero de 2012.
- J.I Ibarreche, O. Altuzarra, V. Petuya, A. Hernández, Ch. Pinto. Structural synthesis of the families of parallel manipulators with 3 degrees of freedom. 19th CISM-IFToMM Symposium on Robot Design, Dynamics and Control (ROMANSY 2012). Paris, France, 12 al 15 de junio de 2012.
- O. Altuzarra, I. Seras, J. Aginaga, E. Macho. A Low Energy Consumption Solar Tracker based in Parallel Kinematics. 19th CISM-IFToMM Symposium on Robot Design, Dynamics and Control (ROMANSY 2012). Paris, France, 12 al 15 de junio de 2012.
- M. Diez, V. Petuya, M. Urízar and A. Hernández. Protein Folding Pathways Implementing Dihedral Angle Variable Speed. 13th International Symposium on Advances in Robot Kinematics (ARK 2012). Innsbruck, Austria, 24-28 de junio 2012.
- J. Corral, Ch. Pinto, F.J. Campa and O. Altuzarra. Dynamic Capabilities of a Parallel Robot Based Routing Machine. 13th International Symposium on Advances in Robot Kinematics (ARK 2012). Innsbruck, Austria, 24-28 de junio 2012.
- S. Herrero, C. Pinto, J. Corral and O. Altuzarra. Actuators orientation influence in the energy consumption of the 3-PRS manipulator. Proceedings of the ASME 2013 International Mechanical Engineering Congress & Exposition. San Diego, USA, 15-21, november, 2013.
- M. Diez, V. Petuya, M. Urizar, E. Macho and O. Altuzarra. Computation of the Protein Molecular Mechanism Using Adaptive Dihedral Angle Increments. 4th European Conference on Mechanism Science (EUCOMES 2012). Santander, Spain, 18-22 de septiembre de 2012.
- O. Altuzarra, O. Salgado, A. Hernández and Ch. Pinto. Analytical Determination of the Instantaneous Motion Capabilities of Robotic Manipulators. 4th European Conference on Mechanism Science (EUCOMES 2012). Santander, Spain, 18-22 de septiembre de 2012.
- S. Herrero, Ch. Pinto, J. Corral, J. Aginaga and F.J. Campa. Simplified Kinetostatic Model of the 3-PRS Manipulator. 4th European Conference on Mechanism Science (EUCOMES 2012). Santander, Spain, 18-22 de septiembre de 2012.
- J. Corral, Ch. Pinto, F. J. Campa and O. Altuzarra. Performance characteristics of a parallel manipulator based routing machine. ISR2012- 43rd International Symposium on Robotics. Taipei, Taiwan, 29-31 de agosto de 2012.
- S. Herrero, Ch. Pinto, J. Corral and A. Zubizarreta. Simplified Kinetostatic Model of the 3-PRS Manipulator. ISR2012- 43rd International Symposium on Robotics. Taipei, Taiwan, 29-31 de agosto de 2012.
- M. Urízar, V. Petuya, M. Diez and A. Hernández. Dimensional Synthesis of a Spatial Orientation 3-DoF Parallel Manipulator by Characterizing the Configuration Space. 6th European International Workshop on Computational Kinematics (CK2013). Barcelona, Spain, May 12-15, 2013.
- M. Urízar, O. Altuzarra, M. Diez, F.J. Campa and E. Macho. Kinematic Analysis of Planar Mechanisms by Means of Examples. 1st International Symposium on the Education in Mechanism and Machine Science (ISEMMS 2013). Madrid, Spain, June 13-14, 2013.
- Campa, F.J., Roldán, C., Altuzarra, O., Pinto, Ch.. Mechatronic model of a 2 degrees of freedom parallel kinematic mechanism with ball-screw based actuators. REM 2013, 14th International Workshop on Research and Education in Mechatronics. Viena (Austria), 6-7 de Junio de 2013.
- C. Roldán, F.J. Campa, O. Altuzarra and E. Amezua. Automatic identification of the inertia and friction of an electromechanical actuator. The Second Conference on Mechanisms, Transmissions and Applications (MeTrApp 2013). Bilbao, Spain, October 2-4, 2013,.
- M. Urízar, V. Petuya, M. Diez, E. Macho and A. Hernández. Non-singular Transitions Based Optimal Design Methodology for Parallel Manipulators. The Second Conference on Mechanisms, Transmissions and Applications (MeTrApp 2013). Bilbao, Spain, October 2-4, 2013.
- A. Ruiz, F.J. Campa, O. Altuzarra, V. Petuya, C. Pinto and A. Hernández. Axis cross-coupling reduction on a high bandwidth XY flexure stage. The 3rd International Conference on Microactuators and Micromechanisms (MAMM 2014). Timisoara, Romania, 2-4 October 2014.
- M. Diez, V. Petuya, M. Urizar and O. Altuzarra. Side chain kinematics simulation on protein conformational changes. The 3rd International Conference on Microactuators and Micromechanisms (MAMM 2014). Timisoara, Romania, 2-4 October 2014.
- O. Altuzarra, F.J. Campa, C. Roldan-Paraponiaris, Ch. Pinto. Experimental Validation of the Mechatronic Model of a Parallel Manipulator. 5th European Conference on Mechanism Science (EUCOMES 2014). Guimaraes, Portugal, 16-19 September 2014.
- S. Herrero, Ch. Pinto, O. Altuzarra, C. Roldan. Analysis and design of the 2PRU-1PRS manipulator for vibration testing. ASME 2014 International Mechanical Engineering Congress & Exposition. Montréal, Québec, Canada, 14-19 November 2014.
- O. Altuzarra, P. Eggers, F. Campa, C. Roldan-Paraponiaris, C. Pinto. Dynamic modelling of lower-mobility parallel manipulators using the Boltzmann-Hamel equations. The 3rd Conference on Mechanisms, Transmissions and Applications, MeTrApp 2015. Aachen, Germany, 6-8 may 2015.
- E. Macho, V. Petuya, M. Urízar, M. Diez and A. Hernández. Educational and Research Kinematic Capabilities of GIM Software. The 3rd Conference on Mechanisms, Transmissions and Applications, MeTrApp 2015. Aachen, Germany, 6-8 may 2015.
- E. Macho, V. Petuya, M. Urízar and A. Hernández. General purpose software tool to solve the inverse dynamics and compute the internal efforts of non-redundant parallel manipulators. The third IFToMM Symposium on Mechanism Design for Robotics, Meder 2015. Aalborg, Denmark, 2-4 june 2015.