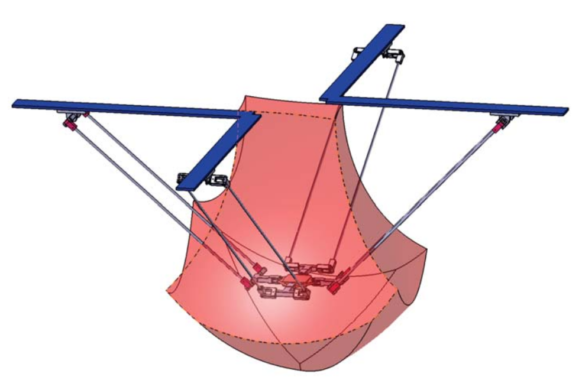
The Araba manipulator is a lower mobility parallel manipulator with 4 degrees of freedom: 3 translations and 1 rotation. The rotation takes place about a vertical plane. Its main application is for pick & place operations. Thus, high velocity and acceleration along with high precision and repeatability are required. In order to get a high precision and high repeatability, stiffness has to be also high.
The manipulator consists of a fixed and a mobile platform connected by four identical legs. The legs consist, starting from the fixed element, of an actuated prismatic joint, a rotation joint, an actuated parallelogram joint and other two rotation joints (PRPaRR).
[ezcol_1half] 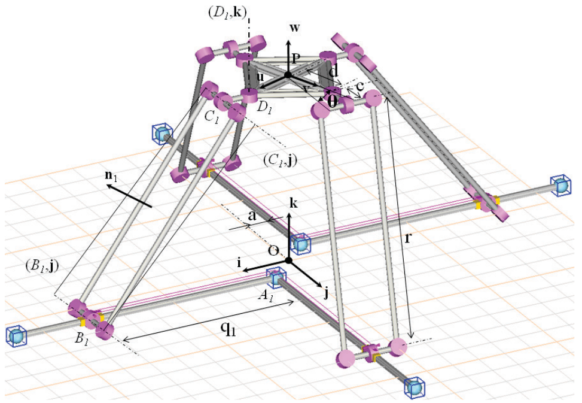 [/ezcol_1half]
[/ezcol_1half]