
Name of the prototype: Parallel continuum manipulator for trunk rehabilitation
Belonging to the project: MEDUSA
The rehabilitation device here proposed is based on a parallel continuum manipulator for the rehabilitation of trunk in stroke patients who have lost the proprioception in half the body. The use of slender elements lies in the fact that they are easier to wear, feel less intimidating since the patient is not fixed to a rigid mechanism and can absorb external disturbances. Compared to an exoskeleton with rigid members, the motion achieved is smooth and they act as a mechanical filter for the motion created in the actuators.
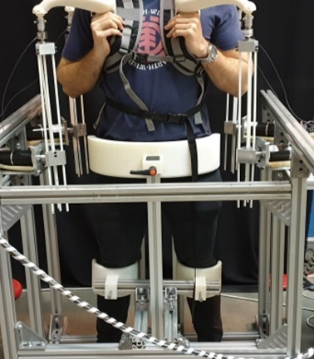
The device consists of a jacket, which is the mobile platform of the parallel mechanism, and four flexible limbs linked in one end to the jacket by means of spherical joints (S-joints) and in the other end to the rotary motors that act as a revolute joint (R-joints). The patient keeps a standing pose up to the hip thanks to the standing frame that fixes the patients knees and hip. The motors, which are fixed to the standing frame, actuate the limbs that deflect thus generating translational and rotational motion in the jacket. The contact surface between patient and jacket is located on his back. The patient wears the jacket by means of several adjustable straps like those of backpacks, keeping a proper contact between patient and jacket, so the motion is properly transmitted. The following pictures show the robot design developed and details of the jacket designed.
