Name of the prototype: 2PRU – 1PRS
Belonging to the project: DYNAMECH
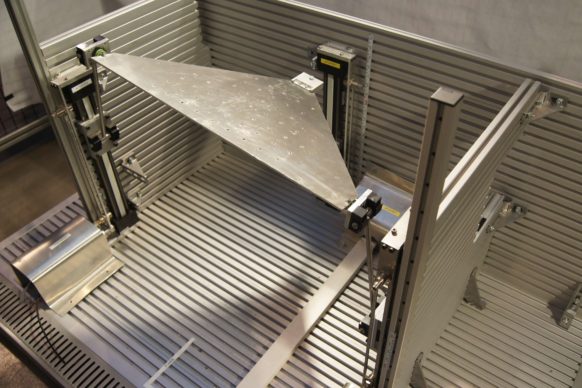
The 2PRU-1PRS parallel manipulator consists of a mobile and a fixed platform connected by three limbs. The mobile and the fixed platforms are isosceles triangles. The first and the third limbs are identical chains that consist of, starting from the base, a prismatic joint, a revolute joint and a universal joint (PRU). However, the second limb is composed of a prismatic joint, a revolute joint and a spherical joint (PRS). Additionally, the limb planes of the first and third limbs are coincident and perpendicular to the second one.
The 2PRU-1PRS parallel manipulator in this configuration has 3 degrees of freedom (DOF) – a vertical translation (Z axis) and two rotations about two perpendicular axes inter-secting at the fixed platform center (X- and Y-axes). There is also one parasitic motion – a translation along the X-axis.
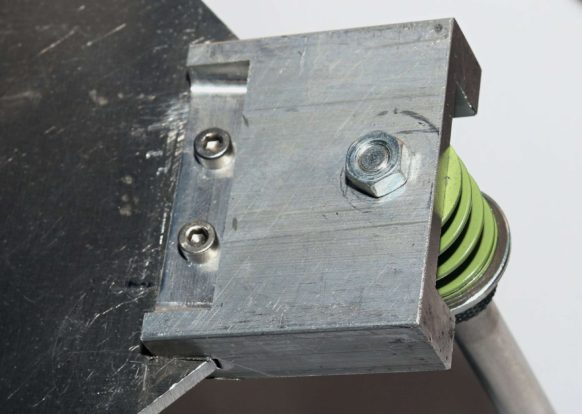
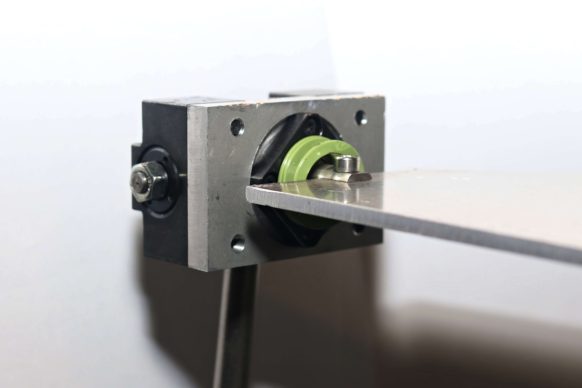
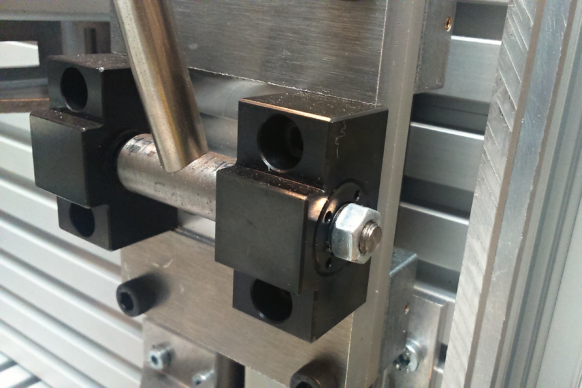
We have designed specific revolute and universal joints in order to get the desired movements. However, the spherical and prismatic joints are commercial products. We have built the limbs in steel to make the stiffness of the whole manipulator higher and the mobile platform in aluminium.
We have used this prototype to check the kinematics, workspace, stiffness, dynamics and natural frequencies with the results obtained theoretically.