
Name of the prototype: 5R
Belonging to the projects: PARAMEC SAIOTEK 2013 (Government of the Basque Country), EHUA13/30 (Government of the Basque Country) & DYNAMECH
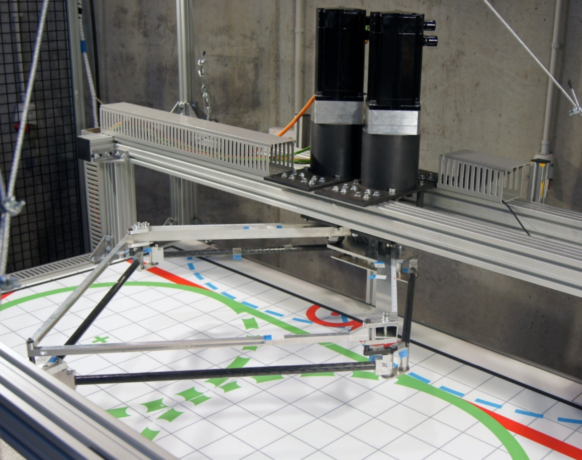
The 5 R mechanism is a parallel manipulator with XY planar motion capabilities.
Initially, we had built a 5R parallel mechanism with the terminal being a point. The main drawback of the design was that it was not possible to attach any end-effector or fastener system to the terminal and, thus, it was not possible to manipulate objects. In order to avoid this problem, a second 5R parallel mechanism was attached to the original one, so both move all at one. This solution has two main advantages:
– The second mechanism has a platform as terminal, so different objects can be attached and manipulated.
– The second mechanism is made of carbon fibre, so it does not add much weight but it increases the stiffness significantly in a direction perpendicular to the working plane.
The prototype with the two mechanisms is shown in the following picture:
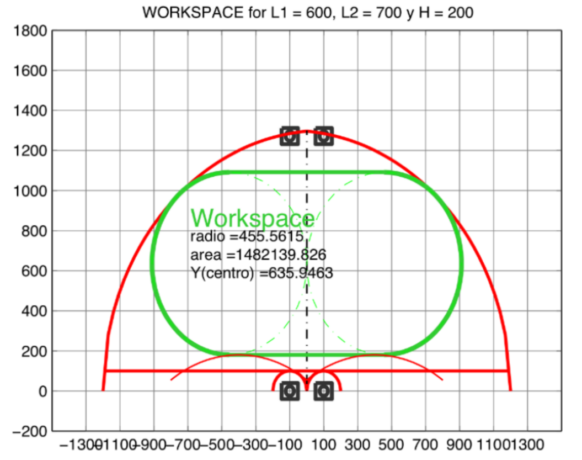
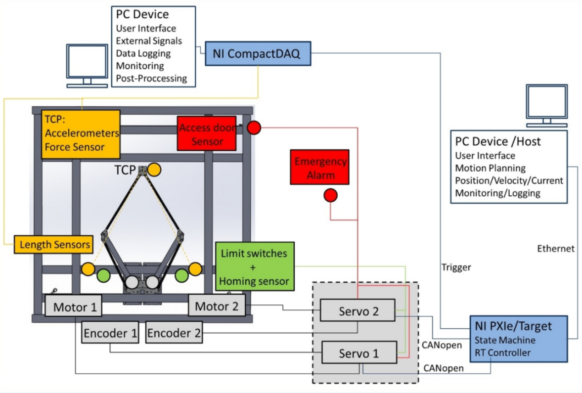
In these two pictures we can see the planar workspace of the manipulator and the representation of the mechatronic model developed for this manipulator:
[ezcol_1half]
[/ezcol_1half]
You can see the prototype motions in these videos:
- Motion in X axis:
- Motion in Y axis:
