
The rehabilitation device here proposed is based on a parallel continuum manipulator for the rehabilitation of trunk in stroke patients who have lost the proprioception in half the body. The use of slender elements lies in the fact that they are easier to wear, feel less intimidating since the patient is not fixed to a rigid mechanism and can absorb external disturbances. […] Read more >>
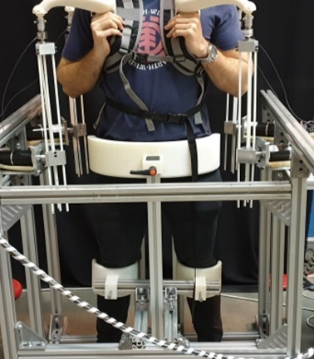
Project: MEDUSA
This compliant parallel mechanism with 3 identical limbs (prismatic joint – revolute joint – spherical joint) has 3 degrees of freedom (DOF) — two rotations about X- and Y-axes and a translation about Z-axis. The use of revolute and spherical hinges allows a precise motion without backflash or friction. The movements archived are a vertical motion of +/- 2 mm and a tilt […] Read more >>
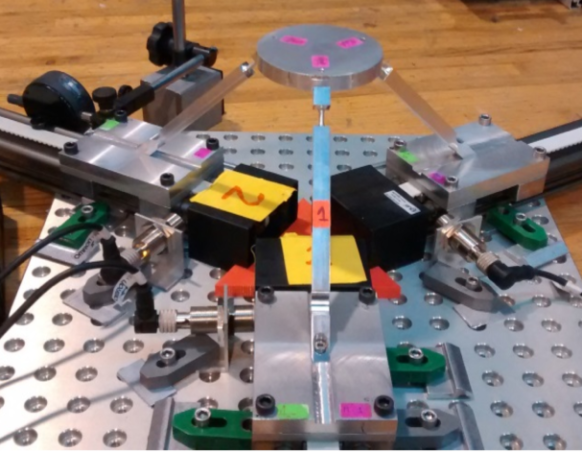
Projects: MEDUSA & Zabalduz 2012
The 2PRU-1PRS parallel manipulator consists of a mobile and a fixed platform connected by three limbs. The mobile and the fixed platforms are isosceles triangles. The first and the third limbs are identical chains that consist of, starting from the base, a prismatic joint, a revolute joint and a universal joint (PRU). However, the second limb is composed of a prismatic joint, a revolute joint and a spherical joint (PRS). Additionally, the limb planes of the first and third limbs are coincident and perpendicular […] Read more >>
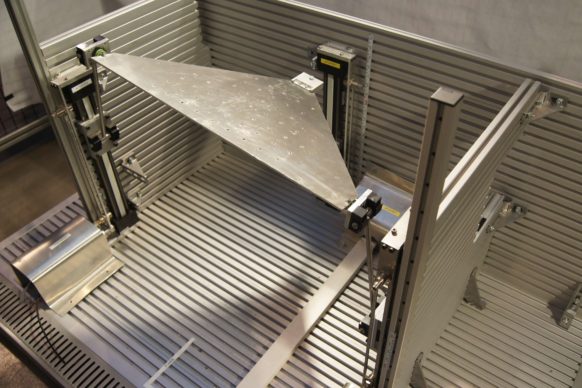
Project: DYNAMECH
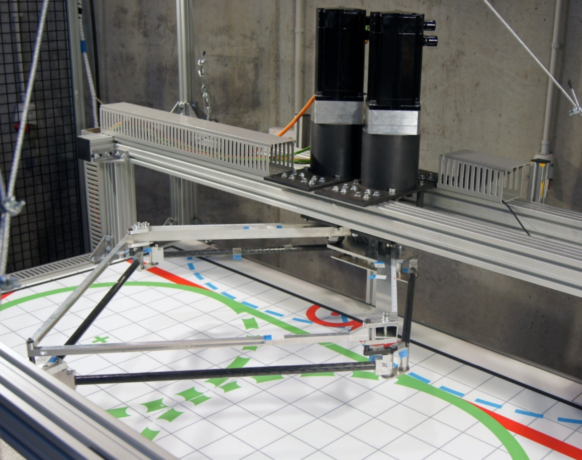
This is a 2 PRR parallel mechanism with XY planar motion capabilities. It is built in aluminium and it has a workspace of 305x25mm. […] Read more >>
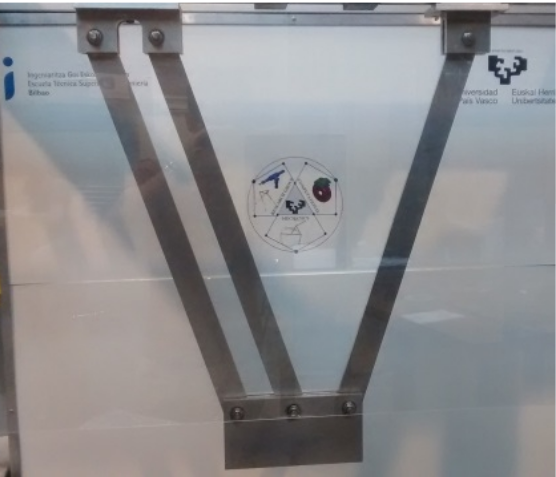
Projects: DYNAMECH
PARAMEC SAIOTEK 2013
EHUA13/30
The 5 R mechanism is a parallel manipulator with XY planar motion capabilities. Initially, we had built a 5R parallel mechanism with the terminal being a point. The main drawback of the design was that it was not possible to attach any end-effector or fastener system to the terminal and, thus, it was not possible to manipulate objects. In order to avoid this problem, a second 5R parallel mechanism was attached to the original one, so both move all at one. This solution has two main advantage […] Read more >>
Projects: DYNAMECH
PARAMEC SAIOTEK 2013
EHUA13/30
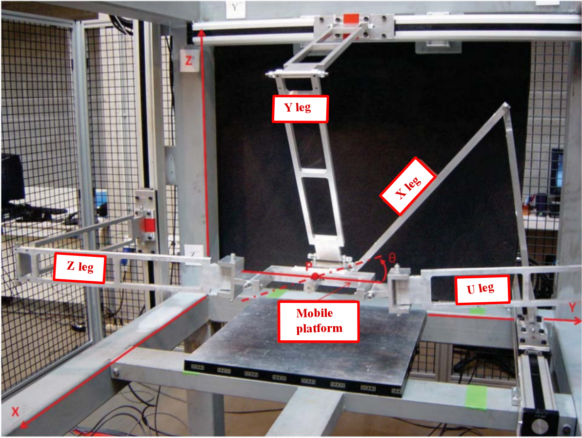
The 3PRS consists of a mobile and a fixed platform joined by three identical limbs. The joints of each limb are – starting from the fixed platform – an actuated prismatic joint, a revolute joint and a spherical joint. It has 3 degrees of freedom – 2 rotations about the X- and Y- axes and 1 translation about the Z-axis. Thus, the 3PRS parallel manipulator is a lower mobility mechanism. Besides the movements along the described degrees of freedom, unexpected movements also appear […] Read more >>

Project:DYNAMECH
Daedalus I is a lower mobility parallel manipulator with 4 degrees of freedom: 3 translations and 1 rotation. The rotation takes place in a horizontal plane. It has been designed for pick & place operations, for which high velocity and acceleration are required. Besides, high stiffness is essential to get and place the objects with precision and repeatability. […] Read more >>
Project: HELIX
The Araba manipulator is a lower mobility parallel manipulator with 4 degrees of freedom: 3 translations and 1 rotation. The rotation takes place about a vertical plane. Its main application is for pick & place operations. Thus, high velocity and acceleration along with high precision and repeatability are required. In order to get a high precision and high repeatability, stiffness has to be also high. […] Read more >>

Project: HELIX